the Creative Commons Attribution 4.0 License.
the Creative Commons Attribution 4.0 License.
 | 11 Dec 2018
| 11 Dec 2018
Short Communication: Monitoring rockfalls with the Raspberry Shake
Andrea Manconi
Velio Coviello
Maud Galletti
Reto Seifert
We evaluate the performance of the low-cost seismic sensor Raspberry Shake to identify and monitor rockfall activity in alpine environments. The test area is a slope adjacent to the Great Aletsch Glacier in the Swiss Alps, i.e. the Moosfluh deep-seated instability, which has recently undergone a critical acceleration phase. A local seismic network composed of three Raspberry Shake was deployed starting from May 2017 in order to record rockfall activity and its relation with the progressive rock-slope degradation potentially leading to a large rock-slope failure. Here we present a first assessment of the seismic data acquired from our network after a monitoring period of 1 year. We show that our network performed well during the whole duration of the experiment, including the winter period in severe alpine conditions, and that the seismic data acquired allowed us to clearly discriminate between rockfalls and other events. This work also provides general information on the potential use of such low-cost sensors in environmental seismology.
- Article
(6038 KB) - Full-text XML
-
Supplement
(1618 KB) - BibTeX
- EndNote





Rockfalls constitute a major hazard in most steep natural rock slopes. The growing number of residential buildings and transport infrastructure in mountain areas has progressively increased the exposure to such processes, making the development of reliable detection systems crucial for early warning and rapid response (Stähli et al., 2015). Local geological and geomorphological conditions are the main pre-disposing factors affecting the sizes of failing rock blocks, the falling dynamics, as well as the total runout distances (Corominas et al., 2017). Different triggering agents (mainly earthquakes and/or meteo-climatic variables) also have an impact on slope failure processes, which can range from a single block fall scenario to large and more complex rock avalanches. In addition, increase in rockfall activity has been observed in areas affected by large and deep-seated slope instabilities prior to catastrophic failure events (Rosser et al., 2007).
Accurate catalogues (including event location, time, and magnitude) are essential to understand and forecast rockfalls, as well as other landslide processes (Kirschbaum et al., 2010). Usual approaches to build catalogues are based on chronicles and observations of past events; however, catalogues may lack completeness, as the information is often qualitative and constrained to limited time windows and/or specific locations. This is especially true for small- to medium-size rockfall events (Paranunzio et al., 2016). For this reasons there is an increasing focus on more quantitative monitoring approaches, which can provide accurate and unbiased datasets.
As rockfall phenomena also induce seismic waves (Dammeier et al., 2011; Dietze et al., 2017), seismic instruments can be installed directly on the unstable rock face to catch precursory signs of rock failure (Arosio et al., 2009), or at relatively large distances to detect a rockfall event occurrence and its propagation (Manconi et al., 2016). In particular, seismic sensors present a significant number of advantages as they are (i) compact and relatively low-cost sensors, (ii) highly adaptable to difficult field conditions, and (iii) can provide reliable information in their flat-response frequency range on a broad spectrum of mass wasting processes occurring in relatively large areas (Burtin et al., 2014; Coviello et al., 2015; Vouillamoz et al., 2018). Consequently, in recent years the seismic signature of rock-slope failure phenomena has been investigated by several authors in different environments and monitoring set-ups (e.g. Helmstetter and Garambois, 2010; Zimmer and Sitar, 2015; Fuchs et al., 2018). The results have shown how it is possible to derive information to characterize rockfalls from the seismic signals, with different levels of accuracy depending on signal sampling rates, distances between the sensors, and the event, as well as the network density (Hibert et al., 2017; Provost et al., 2018). High-resolution, dense seismic networks are expensive to install and need resource-intense maintenance: one high-resolution seismic station costs in the order of tens of thousands of US dollars to build and equip, including sensors, on-site data acquisition systems, telecommunications, and back-up power. Thus, low-cost solutions are becoming more and more attractive to increase the capability of detection and investigation of seismic activity (Cochran, 2018). Moreover, low-procurement, as well as limited installation and maintenance efforts, is envisaged in case of the deployment of seismic networks including tens (or even hundreds) of sensors. In this scenario, a recently developed low-cost seismic sensor, i.e. the Raspberry Shake (RS) seismometers, provides an interesting low-cost plug-and-play solution. The RS devices have become more and more popular, mainly for home use, educational purposes, and outreach. However, their potential for seismic monitoring in challenging environmental conditions is still unexplored. In this work, we show the results of a 1-year pilot test performed in the Swiss Alps, deploying a network of three Raspberry Shake seismometers to monitor rock-slope failure events associated with a large, deep-seated slope instability. In the following sections, we provide a short technical description of the sensor, introduce the study area selected, and provide details on the performance of the Raspberry Shake.
The RS is an all-in-one plug-and-go solution for seismological applications. Developed by OSOP, S.A. in Panamá, the RS integrates geophone sensors, 24-bit digitizers, period-extension circuits, and computer into a single enclosure (see details in the Supplement). Currently, available RS versions (V6+) measure ground velocities with one (1-D, vertical component) or three (3-D, one vertical and two horizontal components) geophones (4.5 Hz Racothech RGI-20DX) and sampling rates are adaptable up to 100 Hz. Moreover, combination of geophones with other devices like MEMS and omnidirectional pressure sensors are also available. The power supply is 5 V (2.5 A supply) and consumption is estimated in 2.8 W at start-up time and 1.5 W during running time. Data are saved on a local SD card (default 8 Gb, but larger cards can be installed), and the estimated data amount per channel is below 10 Mb day−1 (∼2 years of local storage). Local storage can be thus adapted depending on the SD card mounted, the number of sensors available, and sampling rate selected. By default, time synchronization is based on NTP (Network Time Protocol); however, a GPS module can be connected via USB for situations where internet connection is not available. We refer the reader to the Supplement and to the web page https://raspberryshake.org (last access: 10 December 2018) for additional technical details on power consumption and communication issues. At the moment of our procurement (January 2017) only the RS-V4 was available on the market, and thus the results and performance assessments presented below refer to the 1-D version (vertical component 4.5 Hz geophone, with 50 Hz sampling rate). Recently, Anthony et al. (2018) provided the results of systematic lab and field tests to assess the performance of RS-4Ds and suggested that they are suitable to complement existing networks aimed at studying local and regional seismic events.
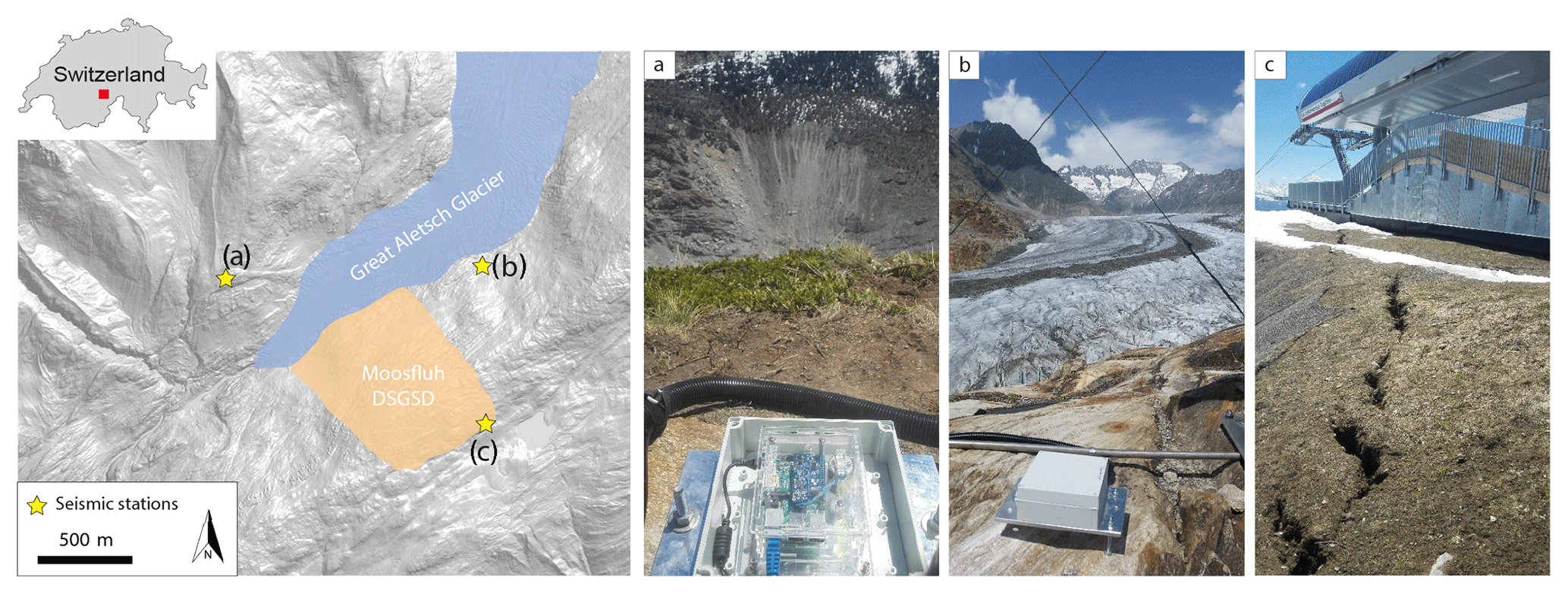
Figure 1(left panel) Map of the area of investigation with indication of the location of the three RS seismic stations starting from May 2017. (a–c) Pictures of the RS installation (a, RS-1; b, RS-2; c, RS-3). Continuous records of seismic signals at the three stations are available since the beginning of July 2017.
The Great Aletsch Glacier region (Swiss Alps, see Fig. 1) has undergone several cycles of glacial advancement and retreat, which have deeply affected the evolution of the surrounding landscape (Grämiger et al., 2017). In this region, the effects of the current climate change are striking, as the Aletsch glacier (blue shading in Fig. 1) is experiencing remarkable retreat with rates in the order of 50 m every year (Jouvet et al., 2011). In particular, a deep-seated slope instability located in the southern slope of the Aletsch valley, more specifically in the area called Moosfluh, has shown evidence of progressive increase in surface displacement during the past decades (Kos et al., 2016; Strozzi et al., 2010). In the late summer 2016, an unusual acceleration of the Moosfluh rockslide was observed, with maximum velocities locally reaching up to 1 m per day (Manconi et al., 2018). Such a critical evolution caused the generation of deep tensile cracks, and resulted in an increased number of rock failures at different locations of the landside body.
In this scenario, we have installed a local network composed of three RS V4 sensors. RS-1 (installed on 19 May 2017) and RS-2 (installed on 27 June 2017) are co-located within precedent monitoring infrastructure and exploit the necessary power from them (solar panels and batteries) and the internet connection (GSM) necessary for real-time data transmission (Loew et al., 2017). RS-3 (installed on 3 July 2017) is located in the basement of the Moosfluh cable-car station, and depends on existing power and Internet connection facilities. The coupling between the station and the ground is established through an aluminium plate (10 mm × 180 mm × 280 mm) screwed directly on the rock face by means of three M10 bolt anchors. The standard RS enclosure provided is made of plastic plates (5 mm thickness) and classified as IP10 (see directive IEC 60529, Edition 2.2, 2013, for IP coding). Due to the expected harsh conditions at our monitoring locations, especially during winter periods, we assembled the RS on a polycarbonate enclosure (, IP67, model PC 175/75 HG – https://www.distrelec.ch/, last access: 10 December 2018) to isolate the sensor and the electronic parts from direct effects of external agents (rain, snow, wind, dust, animals, see also details in the Supplement). IP67 enclosures are currently available to buy from the RS shop (not available at the time of our procurement). Data acquired from RS-1 and RS-2 are transmitted in real time to the ETH Zurich servers via cellular network through a mobile access router (AnyRover, see details at https://www.anyweb.ch/, 10 December 2018). Instead, the RS-3 data are stored locally and also forwarded (optional feature in the RS configuration) to a Winston Wave Server (Wave INformation STOrage Network, developed by the Alaska Volcano Observatory to replace the Earthworm Wave Server, data resides in an open source MySQL database).

Figure 2Comparison of background-noise levels between a broadband station (CH.FIESA) and the Raspberry Shake stations (RS-1, RS-2, and RS-3) installed in the Aletsch region for 1 year. Probability density functions (PDFs) of the power spectral densities (PSDs) were computed by stacking windows of 10 min in two reference weeks, one in winter (a, 1–8 March 2017) and one in summer (b, 1–8 August 2017). The black lines represent high and low reference noise models. The broadband station CH.FIESA managed by the Swiss Seismological Service is installed in the Aletsch region about 5 km away from the RS network. Branching of PSD/PDF at RS-3 is caused by diurnal operations of the cable car.
4.1 Monitoring performance
RS-1 and RS-2 stations, both installed on the ground surface at elevations >2000 m a.s.l. in an alpine environment, provided continuous records of seismic data since the installation without any site intervention in the 1-year monitoring period presented here. Air temperatures in this period ranged from −20 ∘C in winter to +25 ∘C in summer, and snow cover up to 3 m was recorded at the RS-2 location and around 1.5 m at the RS-1 location between January and March 2018. This confirms that the enclosure we have deployed was sufficient to protect the Raspberry Pi components against alpine environmental conditions. We reported only very limited data loss (in total less than 5 min records over 1 year) at the stations RS-1 and RS-2, associated with planned system restarts after configuration changes (performed through remote access). However, at the RS-3 location, the data loss was more consistent (in total 1 week of data loss), due to power outage at the cable-car station during a period of planned maintenance. However, the problem was unrelated to the RS-3 system itself, which started to properly record data again without intervention when the power was set back to normal. Data transfer through the cellular network links (RS-1 and RS-2) also worked smoothly during the 1-year period. The results of systematic ping tests (20 ICMP echo pings of 56 bytes every 300 s) show an average response time below 100 ms. No remarkable network outage is reported during the period of observation (see also the Supplement), thus ensuring continuity for potential near-real-time analyses, as well as for the NTP service synchronization. Estimated timing quality is thus in the order of ±0.02 s (1 sample) or better. The current network density (three stations with inter-station distance of about 1 km) is sufficient for detection and validation of the seismic signals but probably not enough to achieve accurate source locations. These inaccuracies can be further enhanced by time synchronization issues between the stations due to the use of NTP services; however, expected timing errors are in the order (or smaller) of the biases due to incorrect velocity models or imprecise phase picking (Anthony et al., 2018; Lacroix and Helmstetter, 2011).
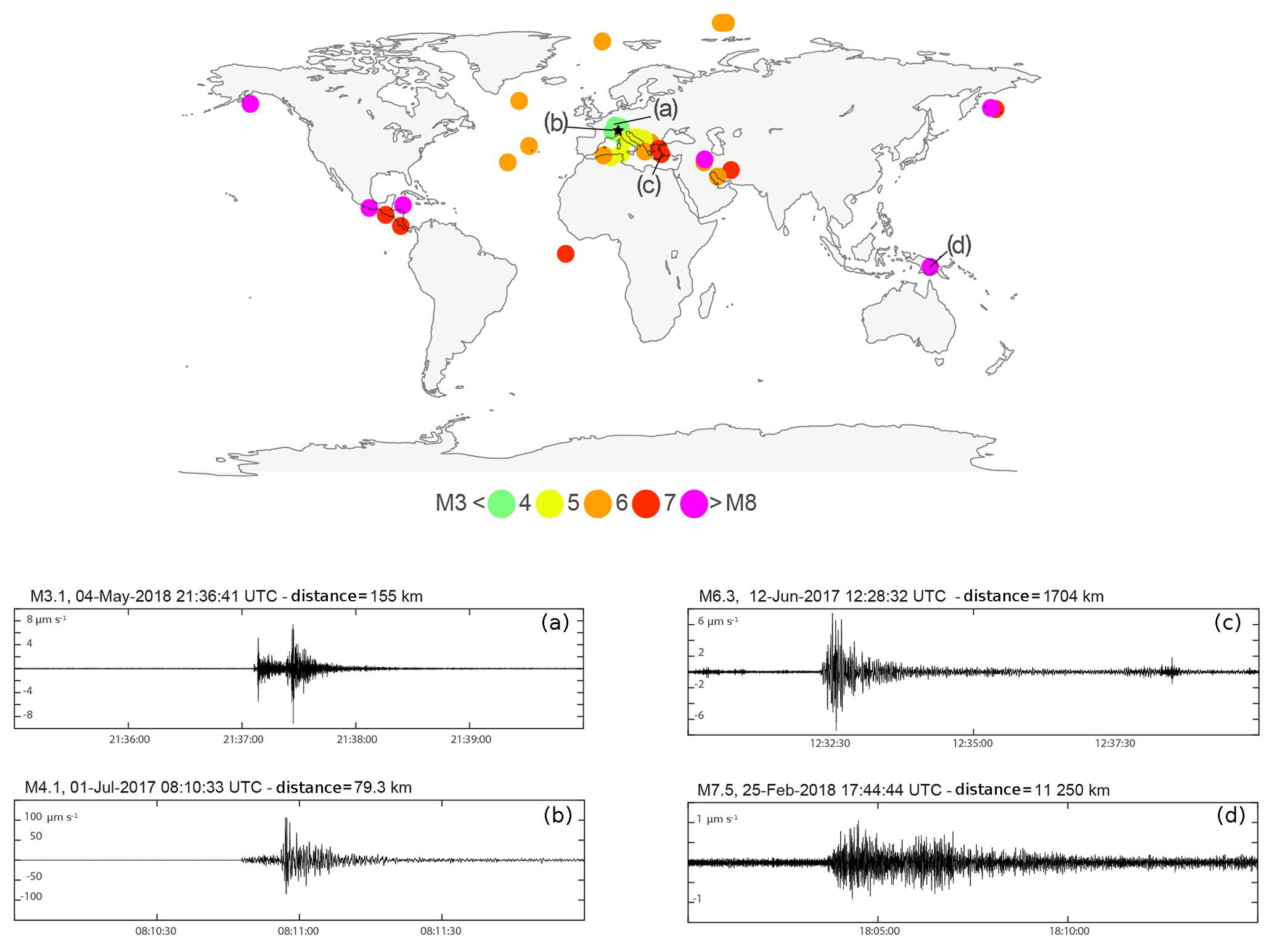
Figure 3Performance of the RS-1 station in recording earthquakes. (top panel) Spatial distribution of earthquake events identified in the RS-1 waveforms out of a catalogue of 64 earthquakes that occurred within the 1-year time period at distances up to 15 000 km. (a–d) Examples of seismic signals recorded by RS-1 associated with earthquakes of different magnitudes that occurred at increasing distances from the monitoring station. Signals are band-pass filtered (Butterworth, second-order) between 0.5 and 15 Hz.
We investigated the quality of the seismic data acquired by comparing the background noise (McNamara and Buland, 2004) of our three RSs against a reference broadband seismic station (CH.FIESA, managed by the Swiss Seismological Service, SED; see details at http://stations.seismo.ethz.ch, 10 December 2018) located at about 5 km distance from the RS-1 station (Fig. 2). The results show that the RS stations performed within the expected boundaries for such low-cost sensors (see also nominal instrumental noise levels in the Supplement). As expected, the main difference between the CH.FIESA and our stations is the performance for long period signals (>10 s), due to bandwidth limitation of the RS sensors. We also note that during winter, performance for short period signals (0.1–1 s) is comparable to CH.FIESA, while in summer it is still within the noise model boundaries (Peterson, 1993) but slightly worse. This is probably because in winter the snow cover (maximum during the observation period 3 m at RS-1 and 1.5 m at RS-2) protected the sensors (which are installed at the surface) against surficial noise sources. Moreover, during winter the glacial environment is relatively quiet compared with the spring and summer periods, when during the day surface water run-off, as well as glacier flows, is very active and may affect the background-noise levels. In addition, anthropic disturbances in this region are stronger during summer periods due to the large number of tourists visiting the Great Aletsch Glacier area. The data acquired from RS-3 systematically suffered from a higher noise level (see the clear PSD/PDF branching in Fig. 2) during the cable-car operational time period (between 08:00 and 16:30 LT, local time), while during evenings and nights the background-noise level was similar to RS-1 and RS-2 stations.
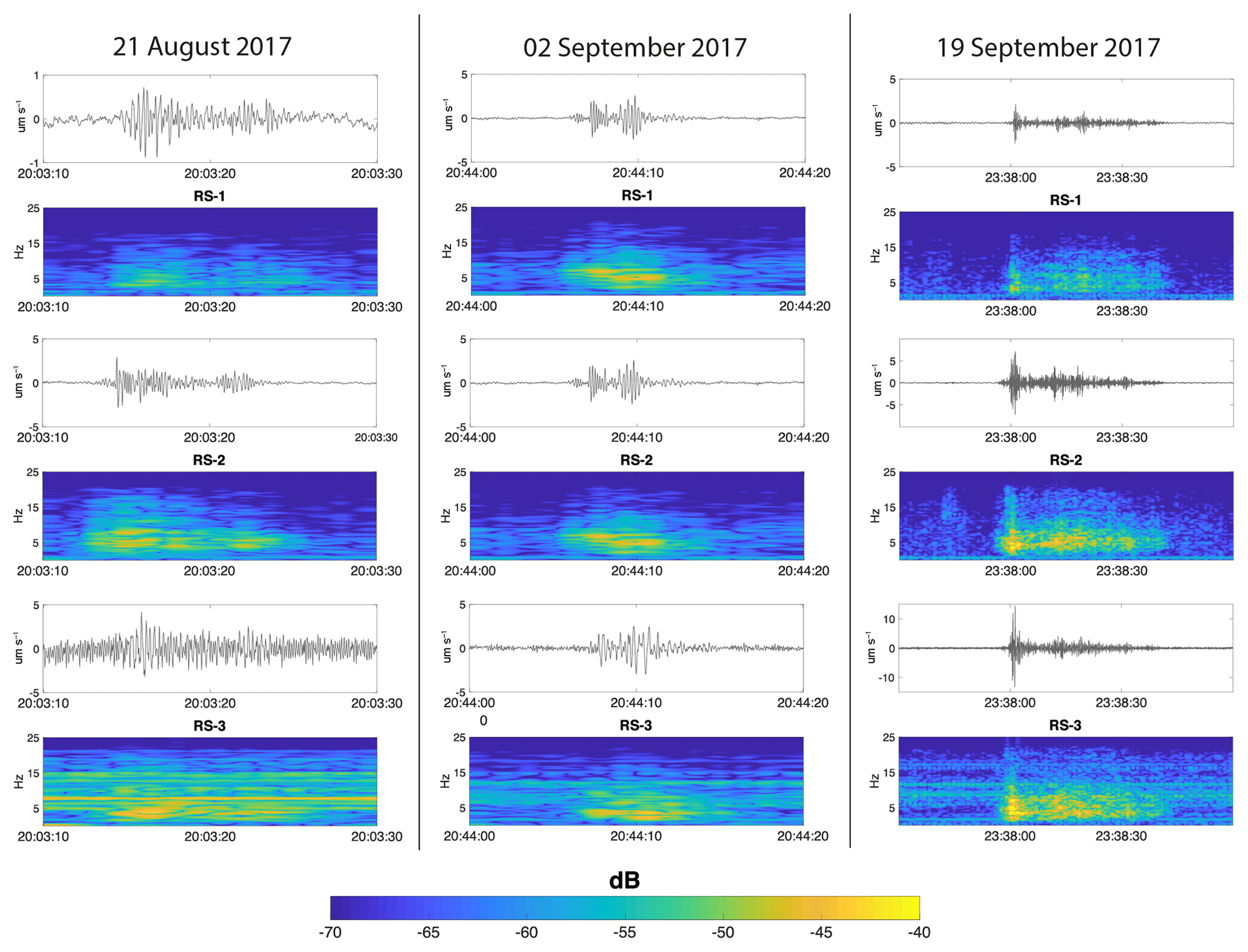
Figure 4Selection of signals associated with rockfall events. Signals are band-pass filtered (Butterworth, second-order) between 0.5 and 15 Hz Times are in UTC. Note the high noise level at station RS-3 caused by the cable-car operations (see also Sect. 4 for more details).
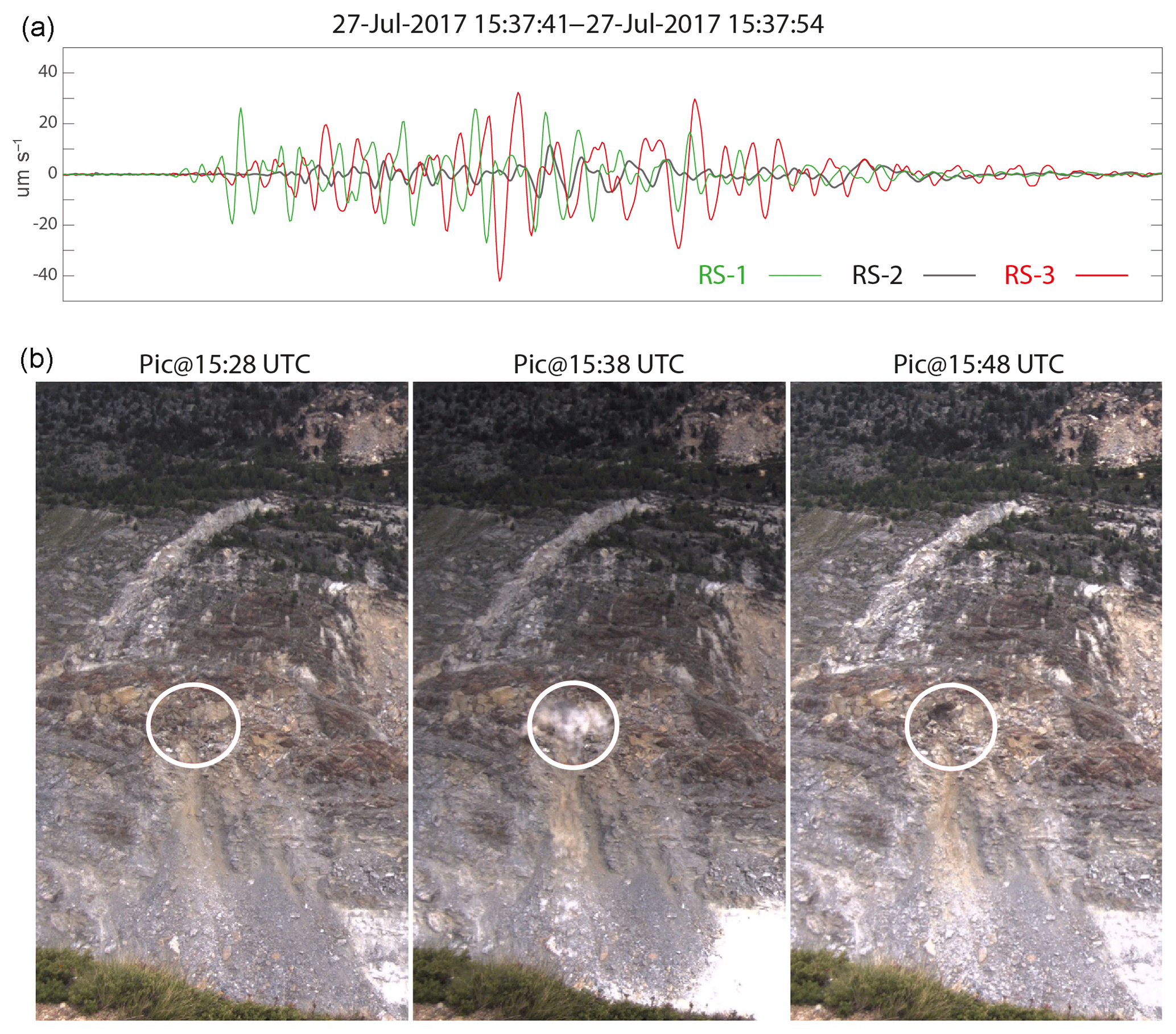
Figure 5Details of a rockfall event that occurred on 27 July 2017 around 15:37 UTC. (a) Seismic signal is clearly visible at the three RS stations. Note the differences in amplitudes and phases. (b) Three snapshots with 10-min baseline acquired by the webcam. The rockfall event is clearly visible (white circle). Future work will jointly exploit seismic and optical images to locate and characterize rockfall events.
4.2 Earthquakes
In a monitoring scenario where the main interest is to detect rockfalls, recognition of earthquake events in the seismic traces is very important for two main reasons: (i) ground shaking due to local earthquakes (distances <100 km) can cause rockfalls (e.g. Romeo et al., 2017), thus their identification is important to properly study the triggering factors affecting the rock-slope degradation; (ii) the signals associated with distant events, such as regional earthquakes (distance >100 km) and teleseisms (distance >1000 km) have characteristics that might be similar (in terms of amplitudes and durations) with the signals caused by mass wasting phenomena (Dammeier et al., 2011; Helmstetter and Garambois, 2010; Manconi et al., 2016; Provost et al., 2018), and thus introduce a bias in the aimed for rockfall catalogue. In order to test the performance of our local RS network, we selected seismic events from the catalogue provided by USGS (NEIC, see catalogue in the Supplement, Table S1), considering crustal events at depths shallower than 50 km, magnitudes larger than M2.5, and distances up to 15 000 km from our study area within the 1-year time period (19 May 2017 and 19 May 2018). We found that 47 out of the 64 selected earthquake events (∼73 %) were clearly visible in the waveform recorded by the RS-1 (Fig. 3). As expected, the detectable magnitude as well as the signal amplitude scales with the distance from the seismic event's source. From the waveforms (Fig. 3a–d) it is possible to recognize the main differences in terms of amplitudes, duration, and signal characteristics for different events.
4.3 Rockfall signals
About 250 rockfall events have been visually identified in the seismic traces (recorded by at least in two stations) during the period between 1 July and 31 October 2017, and systematically validated using the images from the camera installed on the right side of the valley. In Fig. 4 we show a selection of waveforms associated with rockfall events. Qualitative analysis on the signals recorded by the three stations may already provide preliminary indications on the rockfall processes. Considering the amplitudes and durations of the waveforms, we can derive first-order interpretations on the size of the rockfall and/or on the complexity of the event. For example, the rockfall signal recorded on 21 August 2017 is very different from the one acquired on 19 September 2017 in terms of maximum amplitude and total duration. Indeed, the first one is associated with the failure of a single block that did not run out very long due to low energy and/or unfavourable kinematic conditions (presence of obstacles such as deep counterscarps present in the Moosfluh area; Manconi et al., 2018), while the second is associated with a relatively large rock avalanche involving several rock blocks with some of them reaching the glacier (see also pictures in the Supplement). In general, the RS-2 station, which is located on the same slope affected by the rock failure at ∼1 km distance from the source area, records larger amplitudes compared to RS-1 (located in front of the rockfall area but on the other side of the valley) and to RS-3 (installed at the cable-car location). This is always true for the relatively small rockfalls, while in the case of events with longer durations (see for example the 19 September 2017 event in Fig. 4) RS-3 recorded the largest amplitude. The webcam pictures helped to confirm events recorded during daylight, cloud-free conditions; however, as the majority of the events in our period of observation occurred over night (see Supplement, Fig. S3), the identification is often not straightforward when there is more than one event per night. In some cases, despite clear seismic signals, we did not see any changes in the webcam pictures acquired before and after. This can be caused by the low resolution of the pictures and/or by rockfall events that occurred out of the camera's view, as well as by other processes occurring in the subsurface (i.e. creeping and stick-slip behaviour) observed also at other large rock-slope instabilities (Poli et al., 2017). In Fig. 5, we show a clear example where the seismic signals recorded at the three RS stations are unambiguously validated as a rockfall event by consecutive pictures. Differences in signal phases and amplitudes, as well as in first arrivals, can be related to the different source-station distances, propagation of surface waves through different materials, or site effects at the station locations.
4.4 Other sources of seismic signals
We report a signal recorded on 23 August 2017 (see Supplement, Fig. S4) which presented typical characteristics of a surficial mass wasting, i.e. emerging onset and major spectral content between 2 and 5 Hz; however, the first arrivals as well as the amplitudes were very similar at both RS-1 and RS-2 (high noise levels due to the cable-car operations did not allow us to detect this event at RS-3). Moreover, the webcam pictures acquired before and after the event did not show changes potentially referring to a mass wasting in the local study area. Indeed, this signal is the seismic signature of the Piz Cengalo rock avalanche (ca. 3 million cubic metres of failed material) occurred more than 100 km away from the monitoring location (Amann et al., 2018). This confirms the potential of low-cost RS sensors to detect relatively large surface mass wasting processes not only at very local scales but also at regional scales.
Apart from geophysical phenomena, we systematically observed seismic signals associated with environmental variables (such as rainfall events) of an anthropic nature (for example helicopter and airplane flights) and/or of an unclear source (see the Supplement) during the monitoring period presented here. In the Supplement we present examples of these signals. Since our future work is aimed at exploring ad hoc algorithms to attempt automatic detection and location of the rockfall events in alpine settings, sources of disturbances on seismic signals will be carefully evaluated and further investigated to understand their nature and mitigate their effect on data analysis (Meyer et al., 2018).
In this work we show the performance of a network of three Raspberry Shake (RS) during a 1-year pilot project aimed at testing such low-cost seismic sensors (developed for home use) to study rockfall activity in alpine environments. Our results highlight that, despite installation on the rock surface and only moderate protection from the expected harsh environmental conditions, the RS seismometers provided continuous waveforms during the 1-year observation period, without any further intervention after the installation. Continuous seismic monitoring for rockfall detection is of high relevance in alpine areas, where the use of other instruments can be hindered due to environmental conditions, logistics, and/or high costs. We also show that low background-noise levels at our RS stations allowed for the detection of local, regional, and distant earthquakes, as well as large mass wasting at relatively large distances. Currently, visual interpretation of the waveform properties in time and frequency domains allowed us to discriminate between rockfall events associated with the evolution of the slope instability, e.g. rockfall phenomena of different size and runout, and seismic events, such as regional earthquakes and teleseisms. Future work is aimed at developing automatic detection and discrimination, as well as at attempting location of seismic signals due to rockfalls. During the design of this pilot study, we aimed at retrieving the number of rockfall events that occurred and use the event amplitudes and durations as a proxy to classify their size. However, as demonstrated in this work, the performance of the RS in alpine environment look better than expected, and the use of higher sampling rates, as well as 3-D ground velocity records instead of 1-D vertical components only, might further enhance the capacity of better describing rockfall events. We thus foresee that due to their good performance and low cost, RS will be more and more adopted in research studies.
The Raspberry Shake worldwide network (https://doi.org/10.7914/SN/AM, Raspberry Shake Community, 2016) is accessible through FDSN web services at http://caps.raspberryshakedata.com/ (last access: 10 December 2018).
The supplement related to this article is available online at: https://doi.org/10.5194/esurf-6-1219-2018-supplement.
AM designed the study, installed the instruments, analyzed the data, and wrote the paper. VC and MG participated in the field campaigns, analyzed the data, and participated in the paper writing. RS provided support for the design and installation of the instruments in the Aletsch region. All the authors revised the manuscript.
The authors declare that they have no conflict of interest.
This article is part of the special issue “From process to signal – advancing environmental seismology”. It is a result of the EGU Galileo conference, Ohlstadt, Germany, 6–9 June 2017.
We thank Branden Christensen and Richard Boaz (OSOP) for detailed technical information
on the RS sensors. Discussions with John Clinton (ETHZ-SED), Matteo Picozzi (University
of Naples, Fedefico II), Angelo Strollo (GFZ Potsdam), and Víctor Márquez (CGEO
UNAM) provided important hints during the pilot study and the paper writing. We are
indebted to Robert Tanner from ETHZ-SED for the RS network communication settings and
continuous support on automatic data transfer. We thank the reviewers Jan Beutel (ETHZ)
and Florian Fuchs (University Vienna), as well as the editor Fabian Walter (ETHZ), for
their insightful comments and suggestions to improve the
manuscript.
Edited by: Fabian Walter
Reviewed by: Florian Fuchs and Jan Beutel
Amann, F., Kos, A., Phillips, M. Kenner, R.: The Piz Cengalo Bergsturz and subsequent debris flows, Geophys. Res. Abstr., 20, EGU2018-14700, EGU General Assembly 2018, Vienna, Austria, 2018.
Anthony, R. E., Ringler, A. T., Wilson, D. C., and Wolin, E.: Do Low-Cost Seismographs Perform Well Enough for Your Network? An Overview of Laboratory Tests and Field Observations of the OSOP Raspberry Shake 4D, Seismol. Res. Lett., https://doi.org/10.1785/0220180251, online first, 2018.
Arosio, D., Longoni, L., Papini, M., Scaioni, M., Zanzi, L., and Alba, M.: Towards rockfall forecasting through observing deformations and listening to microseismic emissions, Nat. Hazards Earth Syst. Sci., 9, 1119–1131, https://doi.org/10.5194/nhess-9-1119-2009, 2009.
Burtin, A., Hovius, N., McArdell, B. W., Turowski, J. M., and Vergne, J.: Seismic constraints on dynamic links between geomorphic processes and routing of sediment in a steep mountain catchment, Earth Surf. Dynam., 2, 21–33, https://doi.org/10.5194/esurf-2-21-2014, 2014.
Cochran, E. S.: To catch a quake, Nat. Commun., 9, 2508, https://doi.org/10.1038/s41467-018-04790-9, 2018.
Corominas, J., Mavrouli, O., and Ruiz-Carulla, R.: Magnitude and frequency relations: are there geological constraints to the rockfall size?, Landslides, 15, 829–845, https://doi.org/10.1007/s10346-017-0910-z, 2017.
Coviello, V., Arattano, M. and Turconi, L.: Detecting torrential processes from a distance with a seismic monitoring network, Nat. Hazards, 78, 2055–2080, https://doi.org/10.1007/s11069-015-1819-2, 2015.
Dammeier, F., Moore, J. R., Haslinger, F., and Loew, S.: Characterization of alpine rockslides using statistical analysis of seismic signals, J. Geophys. Res., 116, F04024, https://doi.org/10.1029/2011JF002037, 2011.
Dietze, M., Mohadjer, S., Turowski, J. M., Ehlers, T. A., and Hovius, N.: Seismic monitoring of small alpine rockfalls – validity, precision and limitations, Earth Surf. Dynam., 5, 653–668, https://doi.org/10.5194/esurf-5-653-2017, 2017.
Fuchs, F., Lenhardt, W., Bokelmann, G., and the AlpArray Working Group: Seismic detection of rockslides at regional scale: examples from the Eastern Alps and feasibility of kurtosis-based event location, Earth Surf. Dynam., 6, 955–970, https://doi.org/10.5194/esurf-6-955-2018, 2018.
Grämiger, L. M., Moore, J. R., Gischig, V. S., Ivy-Ochs, S., and Loew, S.: Beyond debuttressing: Mechanics of paraglacial rock slope damage during repeat glacial cycles, J. Geophys. Res.-Earth, 122, 1004–1036, https://doi.org/10.1002/2016JF003967, 2017.
Helmstetter, A. and Garambois, S.: Seismic monitoring of Séchilienne rockslide (French Alps): Analysis of seismic signals and their correlation with rainfalls, J. Geophys. Res., 115, F03016, https://doi.org/10.1029/2009JF001532, 2010.
Hibert, C., Malet, J.-P., Bourrier, F., Provost, F., Berger, F., Bornemann, P., Tardif, P., and Mermin, E.: Single-block rockfall dynamics inferred from seismic signal analysis, Earth Surf. Dynam., 5, 283–292, https://doi.org/10.5194/esurf-5-283-2017, 2017.
Jouvet, G., Huss, M., Funk, M., and Blatter, H.: Modelling the retreat of Grosser Aletschgletscher, Switzerland, in a changing climate, J. Glaciol., 57, 1033–1045, 2011.
Kirschbaum, D. B., Adler, R., Hong, Y., Hill, S., and Lerner-Lam, A. L.: A global landslide catalog for hazard applications – Method, results, and limitations, Nat. Hazards, 52, 561–575, https://doi.org/10.1007/s11069-009-9401-4, 2010.
Kos, A., Amann, F., Strozzi, T., Delaloye, R., von Ruette, J., and Springman, S.: Contemporary glacier retreat triggers a rapid landslide response, Great Aletsch Glacier, Switzerland, Geophys. Res. Lett., 43, 12466–12474, https://doi.org/10.1002/2016GL071708, 2016.
Lacroix, P. and Helmstetter, A.: Location of Seismic Signals Associated with Microearthquakes and Rockfalls on the Séchilienne Landslide, French Alps, B. Seismol. Soc. Am., 101, 341–353, https://doi.org/10.1785/0120100110, 2011.
Loew, S., Gischig, V., Glueer, F., Seifert, R., and Moore, J. R.: Multidisciplinary monitoring of progressive failure processes in brittle rock slopes, in: Rock Mechanics and Engineering Volume 4: Excavation, Support and Monitoring, CRC Press, London, 4, 629–662, 2017.
Manconi, A., Picozzi, M., Coviello, V., De Santis, F., and Elia, L.: Real-time detection, location, and characterization of rockslides using broadband regional seismic networks, Geophys. Res. Lett., 43, 6960–6967, https://doi.org/10.1002/2016GL069572, 2016.
Manconi, A., Kourkouli, P., Caduff, R., Strozzi, T., and Loew, S.: Monitoring Surface Deformation over a Failing Rock Slope with the ESA Sentinels: Insights from Moosfluh Instability, Swiss Alps, Remote Sens., 10, 672, https://doi.org/10.3390/rs10050672, 2018.
McNamara, D. E. and Buland, R. P.: Ambient Noise Levels in the Continental United States, B. Seismol. Soc. Am., 94, 1517–1527, https://doi.org/10.1785/012003001, 2004.
Meyer, M., Weber, S., Beutel, J., and Thiele, L.: Systematic Identification of External Influences in Multi-Year Micro-Seismic Recordings Using Convolutional Neural Networks, Earth Surf. Dynam. Discuss., https://doi.org/10.5194/esurf-2018-60, in review, 2018.
Paranunzio, R., Laio, F., Chiarle, M., Nigrelli, G., and Guzzetti, F.: Climate anomalies associated with the occurrence of rockfalls at high-elevation in the Italian Alps, Nat. Hazards Earth Syst. Sci., 16, 2085–2106, https://doi.org/10.5194/nhess-16-2085-2016, 2016.
Peterson, J. R.: Observations and modeling of seismic background noise, Report, USGS Open-File Report 93-322, https://doi.org/10.3133/ofr93322, 1993.
Poli, P.: Creep and slip: Seismic precursors to the Nuugaatsiaq landslide (Greenland), Geophys. Res. Lett., 44, 2017GL075039, https://doi.org/10.1002/2017GL075039, 2017.
Provost, F., Malet, J.-P., Hibert, C., Helmstetter, A., Radiguet, M., Amitrano, D., Langet, N., Larose, E., Abancó, C., Hürlimann, M., Lebourg, T., Levy, C., Le Roy, G., Ulrich, P., Vidal, M., and Vial, B.: Towards a standard typology of endogenous landslide seismic sources, Earth Surf. Dynam., 6, 1059–1088, https://doi.org/10.5194/esurf-6-1059-2018, 2018.
Raspberry Shake Community: Other/Seismic Network, https://doi.org/10.7914/SN/AM, 2016.
Romeo, S., Di Matteo, L., Melelli, L., Cencetti, C., Dragoni, W., and Fredduzzi, A.: Seismic-induced rockfalls and landslide dam following the October 30, 2016 earthquake in Central Italy, Landslides, 14, 1457–1465, https://doi.org/10.1007/s10346-017-0841-8, 2017.
Rosser, N., Lim, M., Petley, D., Dunning, S., and Allison, R.: Patterns of precursory rockfall prior to slope failure, J. Geophys. Res.-Earth, 112, F04014, https://doi.org/10.1029/2006JF000642, 2007.
Stähli, M., Sättele, M., Huggel, C., McArdell, B. W., Lehmann, P., Van Herwijnen, A., Berne, A., Schleiss, M., Ferrari, A., Kos, A., Or, D., and Springman, S. M.: Monitoring and prediction in early warning systems for rapid mass movements, Nat. Hazards Earth Syst. Sci., 15, 905–917, https://doi.org/10.5194/nhess-15-905-2015, 2015.
Strozzi, T., Delaloye, R., Kääb, A., Ambrosi, C., Perruchoud, E., and Wegmüller, U.: Combined observations of rock mass movements using satellite SAR interferometry, differential GPS, airborne digital photogrammetry, and airborne photography interpretation, J. Geophys. Res., 115, F01014, https://doi.org/10.1029/2009JF001311, 2010.
Vouillamoz, N., Rothmund, S., and Joswig, M.: Characterizing the complexity of microseismic signals at slow-moving clay-rich debris slides: the Super-Sauze (southeastern France) and Pechgraben (Upper Austria) case studies, Earth Surf. Dynam., 6, 525–550, https://doi.org/10.5194/esurf-6-525-2018, 2018.
Zimmer, V. L. and Sitar, N.: Detection and location of rock falls using seismic and infrasound sensors, Eng. Geol., 193, 49–60, https://doi.org/10.1016/j.enggeo.2015.04.007, 2015.