the Creative Commons Attribution 4.0 License.
the Creative Commons Attribution 4.0 License.
 | 18 Jul 2025
| 18 Jul 2025
Short communication: Learning how landscapes evolve with neural operators
Gareth G. Roberts
The use of Fourier Neural Operators (FNOs) to learn how landscapes evolve is introduced. The approach makes use of recent developments in deep learning to learn the processes involved in evolving landscapes (e.g., erosion). An example is provided in which FNOs are developed using input–output pairs (elevations at different times) in synthetic landscapes generated using the stream power model (SPM). The SPM takes the form of a non-linear partial differential equation that advects slopes headwards. The results indicate that the learned operators can reliably and very rapidly predict subsequent landscape evolution at large scales. These results suggest that FNOs could be used to rapidly predict landscape evolution without recourse to the (slow) computation of flow routing and time stepping needed when generating numerical solutions to the SPM. More broadly, they suggest that neural operators could be used to learn the processes that evolve actual and analogue landscapes. Interesting future work could involve assessment of whether learned operators can be applied to other settings or model parametrizations.
- Article
(1115 KB) - Full-text XML
- BibTeX
- EndNote




This paper addresses two challenges in geomorphology. The first is a general one: development of landscape evolution “laws” or “rules”. The second concerns generating predictions of landscape evolution efficiently and rapidly. Doing so is important for establishing the processes (e.g., uplift, erosion, climate, biota) that play a role in generating landscapes. Efficient prediction of landscape geometries (e.g., elevation as a function of space and time) is central to the recovery of histories of such processes from observed landscapes via inverse modeling (e.g., Roberts and White, 2010; Croissant and Braun, 2014; Goren et al., 2014; Glotzbach, 2015; Fernandes et al., 2019; Barnhart et al., 2020). I explore the use of recently developed Fourier Neural Operators (FNOs) to address these challenges (Li et al., 2022; Kovachki et al., 2023).
Understanding how landscapes evolve is a cornerstone of geomorphology and provides useful information for many problems in geology and paleobiology and for hazard and resource assessment (e.g., Anderson and Anderson, 2010; Fernandes et al., 2019; Perrigo et al., 2020; Hoggard et al., 2021; Turner et al., 2023; and references therein). A variety of approaches exist to predict how they evolve in response to tectonic, climatic, and other forcings. These include physical experimentation, e.g., at the scale of flume tanks, and field observations (e.g., Bonnet and Crave, 2003; Scheingross et al., 2017; and references therein). They also include phenomenological and physics-based deterministic and stochastic landscape evolution models (LEMs). Such models are used to predict landscape evolution from erosional “atomistic” scales, e.g. <1 m and <1 s, up to the largest scales, e.g., continents and tens of millions of years (e.g., Hobley et al., 2017; Roberts and Wani, 2024; and references therein). Such models can be developed by combining observations and physics-based insights across scales of interest and can be calibrated with independent geological and geophysical information (e.g., Anderson and Anderson, 2010; Lague, 2014; Fernandes et al., 2019; Roberts and Wani, 2024; and references therein).
In contrast, the neural operator approach seeks to learn the mapping between function spaces from observations. In our case, the function spaces are landscapes at different times and the mapping could be regarded as learning, say, the erosional processes that evolved the landscape. In other words, we seek to answer the following question: what is the operation that has occurred to convert (evolve) a landscape from one time to another? So, instead of assuming that we know the erosional processes responsible for evolving a landscape, for instance, we seek to learn them from the information available, e.g., a landscape at different stages of its evolution. Similar questions have been addressed in other branches of the physical sciences. For instance, Fourier Neural Operators have been used to learn mappings between function spaces generated by solutions to partial differential equations (PDEs), including Burgers', Darcy flow, and Navier–Stokes (e.g., Li et al., 2022). Physics-informed neural operators (PINOs) have been developed to combine training data (e.g., input–output pairs) and constraints from physics to learn solution operators for partial differential equations (e.g., Li et al., 2024).
Despite knowing modern topography very well (from satellite-derived measurements, for instance), developing neural operators using actual landscapes is a very difficult problem because we do not usually know their histories (previous function spaces) with much precision. In contrast, realistic-looking “landscapes” have been produced in flume tank experiments, which could yield time series, i.e., “snapshots” (function spaces) of evolving landscapes that could be used to learn the mapping, e.g., erosional processes and perhaps uplift histories. Similarly, advective and diffusive PDEs are widely used to generate predictions of landscape geometries (e.g., fluvial, glacial, and hill slope topography) and their evolution. Function spaces (i.e., synthetic landscapes) can easily be generated from the solutions to such equations, which could be used to develop neural operators. A useful benefit of the neural operator approach is that, once the learning is done, future function spaces (maps of elevations) can be predicted very rapidly (see Sect. 5.5 in Li et al., 2022, for a fluid mechanics example).
Here, I focus on exploring whether such operators can be established from synthetic landscapes generated using the deterministic stream power model (SPM). This model has the form of a non-linear advective PDE and is used to predict fluvial landscape evolution at a range of scales, from river reaches to continents. I seek to establish whether a deep learning algorithm can determine the operator required to map (convert) a stream-power-derived landscape from one time step to another. In turn, I want to understand if the operator can be used to reliably predict evolution of the landscape at subsequent time steps. Positive answers to those questions would indicate that Fourier Neural Operators can be used to model landscape evolution, providing a step change in the speed at which the evolution of landscapes can be computed once the operators are learned. More broadly, it would, with further work, perhaps provide new tools to generate novel insight into the processes that drive landscape evolution.
2.1 Generating the training information from an LEM
The training information (a set of landscapes: , , where elevation, z, is a function of spatial coordinates, x,y, and t* indicates time step indexing) was produced by solving the stream power model using Landlab routines (Hobley et al., 2017; see Code availability statement). The model solved has the form
where z is elevation, t is time, and A is upstream drainage area (e.g., see Lague, 2014; Hobley et al., 2017; and references therein for additional information about the stream power model and its parametrization in two dimensions). In the examples in this paper, the erosional parameters are v=0.3 Myr−1 and m=0.5. The model domain is an (x×y) 128 km×128 km square with a cell size of km. The starting condition is a 1 km high block of topography across the entire domain, and additional small-amplitude uniform (white) noise, as is typical in such models, is included so that channel networks with realistic geometries form. All boundaries are fixed at zero elevation for the duration of the model. Figure 1 shows example output from the model for a few of the first time steps. As expected, the resultant landscape resembles four escarpments advecting headwards (upstream) from the boundaries, more or less towards the center of the square domain. The exact arrangement of the channels, including their headwaters, depends on the specific noise function (e.g., Kwang and Parker, 2019; Morris et al., 2023). The first 10 time steps (; time step length Δt=1 Ma) are used to train the Neural Operator.
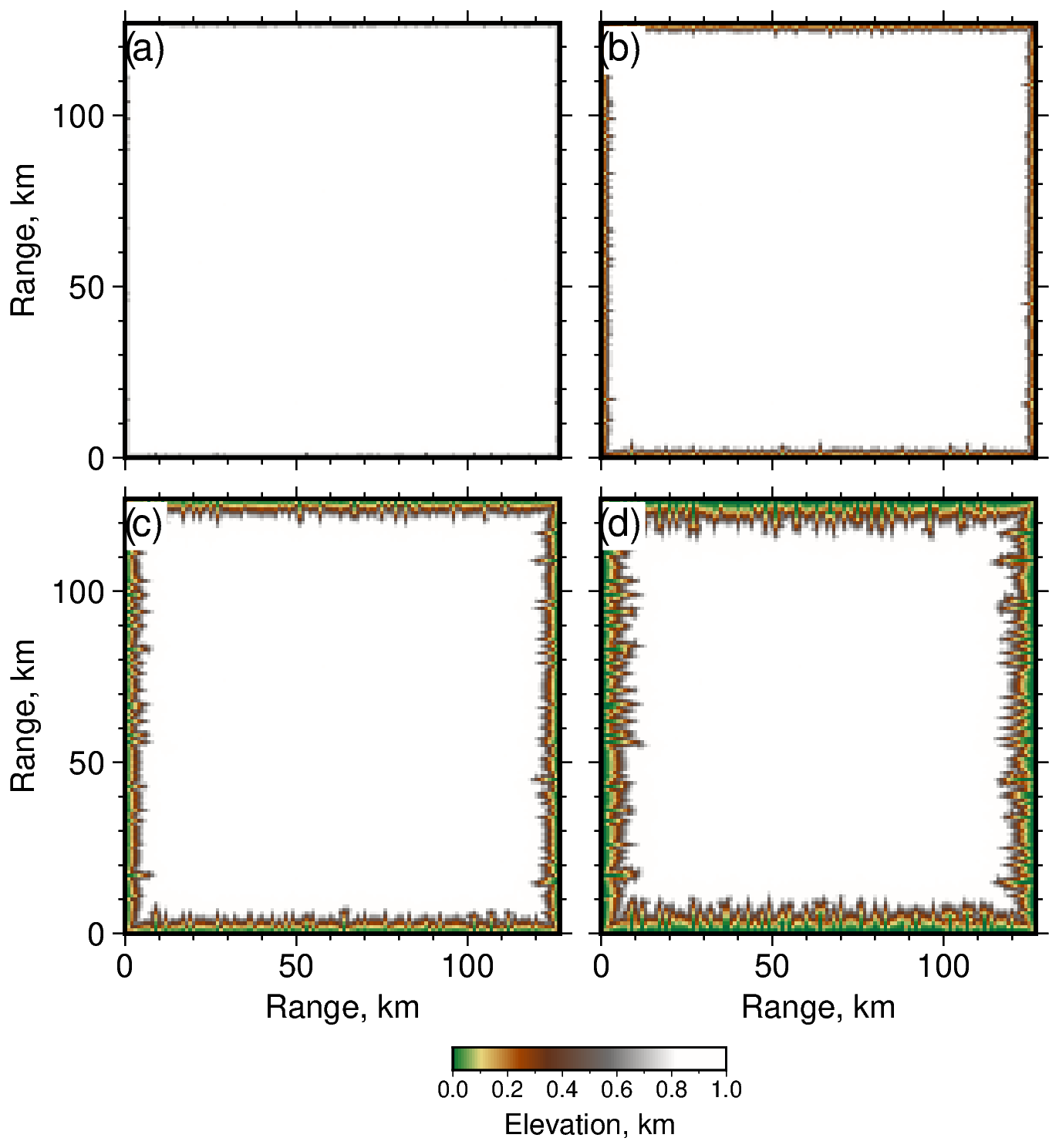
Figure 1Evolution of the synthetic landscape used to train the Neural Operator. The entire training set incorporates digital elevation models at 10 time steps (t* = ; ΔT=1 Myr), generated by solving Eq. (1). Examples of the training “function spaces” (i.e., digital elevation models) at time steps (a) 0, (b) 3, (c) 6, and (d) 9 are shown. The domain is 128×128 with a grid resolution of 1 km (16 384 cells in total).
A note on computational speed of existing LEMs
There are two main concerns with regard to computation time when solving the stream power model numerically, e.g., via finite-difference or finite-volume methods. Firstly, as is typical in such numerical problems, time step length, Δt, plays an important role in determining the computational time required to generate solutions at specific (model) times and also in their accuracy and stability. Such properties are often established by ensuring that the Courant–Fredrichs–Lewy (CFL) condition is met (e.g., Press et al., 2007; Roberts and White, 2010). In this problem, it has the form
Inserting the maximum possible value of A into Eq. (2) should ensure stability at all times across the entire spatial domain. As an example, if we use the maximum possible drainage area (i.e., the entire domain: 16 384 km2) and use the values of the erosional parameters given above, the CFL-derived Δt≤0.026 Myr. If we set Δt = 0.02 Myr, this forward model, using Landlab routines, takes 24.3 s on a computer with a 2.6 GHz Intel Core i7 processor to produce 50 Ma of model time, by which time the initial topographic block is almost completely eroded. In practice, fairly reliable results (i.e., demonstrable convergent landscape geometries at large scales) can be obtained (for this parametrization) even when Δt=1 Ma if the nominally implicit Fastscape scheme is used to compute erosion, resulting in a reduced run time of 2.4 s (Braun and Willett, 2013). Nonetheless, inverse modeling of landscapes for, for instance, their uplift rate histories or erosional parameter values might require in excess of 𝒪(105) forward model runs even for a modestly sized landscape, which is a considerable computational burden (e.g., Croissant and Braun, 2014).
Within a single time step, flow routing and calculation of the upstream drainage area, A, from flow-routing algorithms is nearly always the slowest computation and the second major concern. Recent advances to reduce computation time include careful parallelization, partitioning flow-routing calculations to different computational nodes (Barnes, 2019). Nonetheless, it would be helpful if flow routing and time stepping could be avoided altogether. I now explore whether time stepping and flow routing can be avoided by making use of Neural Operators.
2.2 Neural Operator
A Fourier Neural Operator is used to learn the mapping between the evolving landscape at different time steps based on the approach introduced in Li et al. (2022). This deep learning approach makes use of Fourier transforms to parametrize a kernel integral operator, which is learned from the evolving landscape.
For the specific problem of interest (and often in geomorphology generally), we wish to determine the operator G* that maps (e.g., via the erosional process) elevations in a landscape at one time, 𝒵τ, to those at another time, . Directly approximating operators, , can be very computationally cheap and fast (Li et al., 2022). For the problem of interest, we seek to recover G from synthetic landscapes at discrete time steps,
where t and t+n indicate time step indexing. In the examples examined in this paper, n=1; i.e., we seek to learn G from landscapes at adjacent time steps. Since elevation information can usually be cast as point-wise data, it is straightforward to define input–output pairs, e.g., and .
The neural operator is formulated in three main steps (see Li et al., 2022, for details). Firstly, the input data (e.g., 𝒵t=0) are lifted to a higher dimensional representation with an encoder network (see also Kovachki et al., 2023). Secondly, four layers of integral operators and activation functions are then applied. The “integral operators” are actually convolution operators defined in Fourier space. The scheme uses Fourier modes up to kmax and, as such, acts as a low-pass filter. Finally, the output is then projected back to the target dimension by another neural network. In each iteration, the update is defined as the composition of a non-local integral operator 𝒦 and a local, non-linear activation function, σ (see Li et al., 2022, especially their Fig. 2, for an extended explanation). A minimum working example, demonstrating how the calculations are performed, is provided (see Code availability statement for details).
An Adaptive Moment Estimation (Adam) optimizer is used to train the model, which minimizes differences between Zt+1 and 𝒵t+1. Thus, the operator, G, is defined and can now be used to generate predictions of landscape evolution at other, say, intermediate, and, perhaps more usefully, later times. Specific implementations for the examples discussed in this paper are archived (see Code availability statement). For the two examples shown in this paper, model A was trained for 100 epochs (number of times the learning algorithm uses the entire training set), with kmax=2. Model B was trained for 500 epochs, with kmax=4. The initial learning rate (determining rate at which parameters in the model are updated) in both models was defined as 10−5, which was halved every 100 epochs. The number of training and testing sets (landscapes between 0–9 time steps; see Sect. 3) was held constant at 100 and 20, respectively, and model “width”, which plays a role in lifting the input to a higher dimensional representation, was fixed to be 20. All computation was performed on a single Nvidia GPU. Training took <1 h for each model tested.
Figure 1 shows a subset of the space functions (landscapes) at time steps 0 to 9 generated by the stream power model (with Δt=1 Ma) used to train the neural operator. The full training set is archived (please see the Code availability statement for details). Figure 2 shows predictions from the neural operator models A and B at time steps 10, 20, 30, and 40. For comparison, adjacent to those predictions are the solutions to the stream model at the same times.
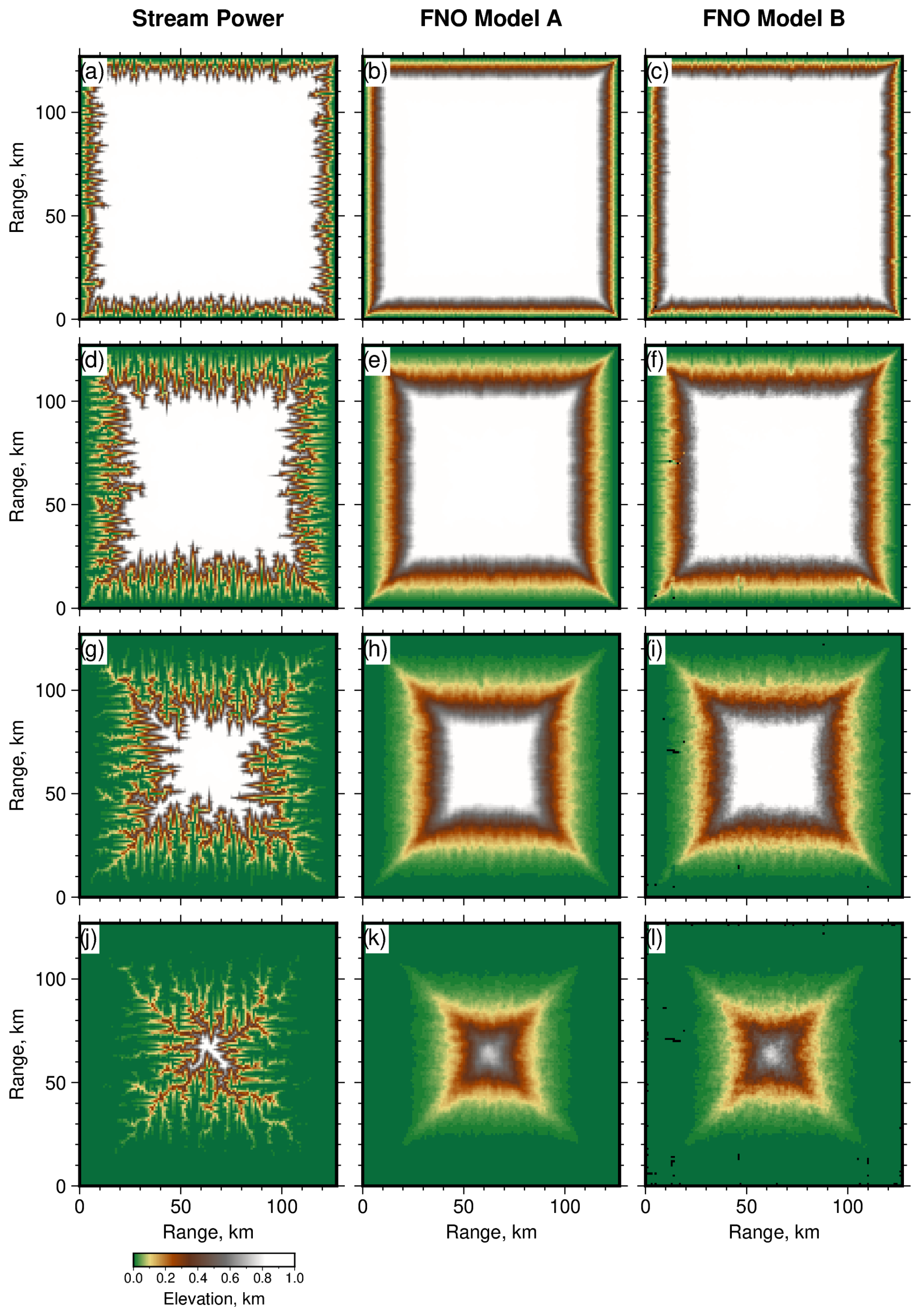
Figure 2Predicted landscape evolution from stream power and Fourier Neural Operator (FNO) models. (a–c) Predicted landscapes at time step 10 from (a) the stream power model, (b) FNO model A, and (c) FNO model B. (d–l) Predicted landscapes at time steps 20, 30, and 40, respectively. See main text for FNO model parametrizations.
Topographic swaths, histograms, and hypsometric curves summarizing the distribution of elevations from the three models (stream power, FNO models A and B) are shown in Fig. 3. The neural operator models do a reasonably good job of capturing the large-scale structure of the evolving landscapes. Like the stream power model, they both include headward “advection” of the four main escarpments. The FNO approach, as implemented, acts as a low-pass filter; hence fine details, such as valley networks, are lost. The resultant landscapes tend to be smoother when compared to predictions from the stream power model (Fig. 2). They also lack the well-developed channels present in landscapes predicted by the stream power model, which is unsurprising given the low-pass filtering. Topographic swaths that traverse the center of the landscapes and from corner to corner further emphasize the relative smoothness of topography predicted by the FNO models, their tendency to be similar to each other (for the model parametrizations tested), and their capture of the overall lowering of topography (Fig. 3). Given the filtering, it is not surprising that the FNO models predict greater or less local (in space and time) erosion than the SPM. Nonetheless, as the histograms and hypsometric curves in Fig. 3 indicate, changes (here only reductions) in elevation across the domain are faithfully reproduced. Increasing the number of epochs increases the presence of short wavelength structure in landscapes predicted by the neural operators. However, doing so can lead to development of local patches of noisy and negative topography (see black pixels in Fig. 2i and l).
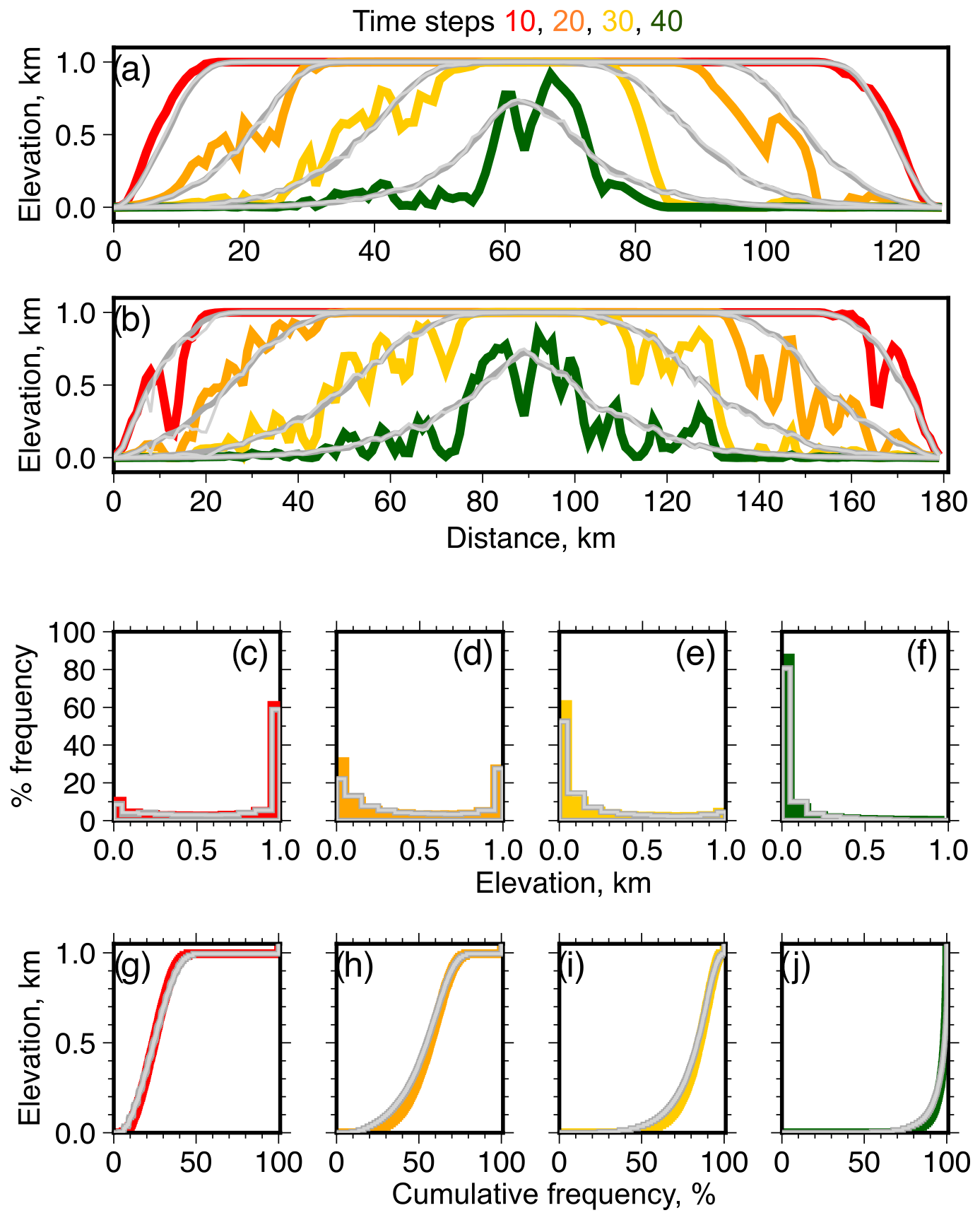
Figure 3Comparison of topographic transects and histograms from evolving landscapes generated with stream power (SPM) and Fourier Neural Operator (FNO) models. (a) Topographic transects across the landscapes shown in Fig. 2 from coordinates (0, 64) to (128, 64), i.e., “west” to “east”. Thick colored lines are transects through SPM at annotated time steps; dark- and light-gray lines are transects though FNO models A and B at those time steps, respectively. (b) Transects from bottom-left to top-right corners, (0, 0) to (128, 128), across the landscapes shown in Fig. 2. (c–f) Percentage frequency histograms of elevations shown in Fig. 2 and (g–j) associated hypsometric curves; line stylings as for panel (a).
Unsurprisingly, the rougher parts of the FNO landscapes (towards the center of the domain) tend to have more sinks (local depressions). Consequently, drainage in the FNO landscapes tends not to be connected and through-going in upper reaches when calculated using the widely used D8 flow-routing algorithm (using the Flow Accumulator Landlab component; Tarboton, 1997; Hobley et al., 2017). These results are analogous to what happens to an SPM when noise is inserted – a generally accepted step that enables realistic planforms to emerge once sink-filling has been performed (e.g., see Barnes et al., 2021, for a useful summary of sink-filling approaches). I note that sink-filled versions of the two FNO landscapes examined have connected drainage with planforms that are broadly consistent with those predicted atop equivalent SPM landscapes. It is an interesting and probably quite fundamental question whether we should regard the presence of sinks as being important or not when we no longer need a flow-routing algorithm to evolve a landscape. A key question is, what do we want these models to predict? For instance, we currently sacrifice realism in both the SPM and FNO approaches at specific scales to obtain solutions of interest. Perhaps it is encouraging that the FNO models can produce reasonable predictions of landscape geometries at large scales even when channel elevations are not monotonic. It may be interesting to explore the use of FNOs to learn landscape evolution from landscape evolution models that more explicitly incorporate physics and generate realistic geometries across the scales of interest; perhaps one way to do so is to make use of landscapes predicted by stochastic theory that naturally includes/can cope with the presence of sinks (e.g., Roberts and Wani, 2024, and references therein).
These results suggest that erosion, at least at large scales, can be learned from evolving landscapes even when the erosional laws are quite complex, depending on, for instance, advective velocities that depend non-linearly on upstream drainage area. In turn, the learned operators can be used to predict landscape evolution at relatively large temporal scales. These results suggest that the use of such an approach in the development of inverse methodologies that seek to calculate uplift or denudation histories from observed fluvial landscapes could be fruitful. For instance, they might find use in developing understanding of landforms generated in response to tectonic or sub-plate processes. Such techniques might find use in examining domal topographic swells and continental escarpments, for example, where the specific details of geomorphic geometries (e.g., historic channel locations) are perhaps less crucial (or knowable) than the larger-scale changes in landform geometries (e.g., Roberts and White, 2010; O'Malley et al., 2021). This approach could be particularly useful when the objective functions used to minimize misfit between observed and theoretical landscape are designed to “see through” the impact of local noise when specific positions of calculated channels and interfluves are largely unimportant (e.g., see the Wasserstein-based approach introduced in Morris et al., 2023).
In may be fruitful to explore the use of alternative training information to develop useful operators; for instance, it would be straightforward to develop training data (input–output pairs) using maps of upstream drainage areas or sedimentary flux predicted by SPMs, or perhaps useful operators could be generated from solutions to different PDEs or stochastic theory (e.g., Eq. 4 in Bonetti et al., 2020; Roberts and Wani, 2024). An obvious concern is that the functions used to generate the operators are sensitive to the things we want to know about. For instance, using elevation appeals to me because of my interests in solving for uplift rate histories. In contrast, upstream drainage areas, at least at large scales, appear to be quite insensitive to some uplift rate histories, e.g., the extreme examples of uplift only varying as a function of time or very smoothly as a function of space (e.g., Roberts and White, 2010; O'Malley et al., 2021). The general theme of structure, interconnectedness, and accuracy of FNO-derived geometries is probably worth examining further in future work.
Clearly, establishing whether FNOs (or other deep learning approaches) developed for one environment, or set of model parametrizations, can be ported to predict landscape evolution in other settings (e.g., driven by different uplift histories or erosional forcings) is likely to be important for future work. Evidence from other domains is promising (e.g., see the results in Li et al., 2022). More work is also required to establish optimal model parametrizations, e.g., numbers of testing and training sets, epochs, learning rates. I note that Li et al. (2022) and Kovachki et al. (2023) discuss how, despite the truncation of higher-frequency modes in the Fourier layer, the operators they produced, as a whole, approximated the functions they examined (e.g., solutions to the Navier–Stokes equation) to frequencies considerably higher than kmax with low error. Li et al. (2022), in their response to reviewers' comments, attribute those results to the lifting of input functions to higher dimensional representations. It will be interesting to establish whether increasing the dimensionality of input landscapes beyond what is explored in this paper (“width” = 20; see Code availability statement) improves predictions of fine structure (e.g., valleys and interfluves) or whether landscapes are special in some way (e.g., perhaps because of flow routing). Preliminary results indicate that changing “widths” between 1 and 32 (whilst holding all other parameters constant) has little impact on predicted landscapes.
Despite the work to be done, it seems clear at this early stage that there can be benefits to using FNOs, including the fact that, once an operator has been generated, predicting landscapes (the “forward model”) is much more efficient than solving the partial differential equations numerically. Such an approach facilitates efficient parameter sweeping and “filling in” gaps between time steps, for instance. More broadly, it seems likely that the development of operators from “analogue” landscapes generated in flume tanks or perhaps from repeat topographic surveying could provide means to develop a new understanding of the processes at play in evolving landscapes (e.g., Lachaise and Schweißhelm, 2023).
This paper introduces the use of Fourier Neural Operators (FNOs) for predicting evolution of landscapes. This deep learning methodology was trained using a simple synthetic landscape that was evolved forward in time using the well-known stream power erosional model. This deterministic kinematic model advects slopes headwards with velocities that depend on upstream drainage area and defined values of erosional parameters. Time steps 0 to 9 were used to generate “learning maps” between the function spaces (landscapes). The learned operators were then applied to predict landscape geometries at time steps 10 to 40. The resultant landscapes were compared to solutions from the stream power model. Two different FNO parametrizations were tested with different Fourier mode filters and learning epochs. Both reproduce solutions from the stream power model at large scales. These results indicate that developing FNOs for landscapes might be a fruitful way to increase the speed with which landscape evolution can be modeled and generate a new understanding of erosional processes. An important piece of work to be done is to develop an understanding of whether operators developed using observations or model output from one setting can be ported to understand landscape evolution in other contexts.
Code, parametrization files, and example output used to generate the training information and digital elevation models for validation, along with code used to generate the Fourier Neural Operator (FNO) and ancillary implementation and plotting scripts, which contain information about how to run the code on a GPU system and how to manage the resultant .mat files, are archived at https://doi.org/10.5281/zenodo.14616760 (Roberts, 2025). Note that the material used to develop and run FNOs is based on work from Li et al. (2022) and Kovachki et al. (2023).
The contact author has declared that none of the authors has any competing interests.
Publisher's note: Copernicus Publications remains neutral with regard to jurisdictional claims made in the text, published maps, institutional affiliations, or any other geographical representation in this paper. While Copernicus Publications makes every effort to include appropriate place names, the final responsibility lies with the authors.
I thank Francois van Schalkwyk and Matthew Morris for their help. I also thank Simon Mudd, Christoph Glotzbach, and the anonymous referee for their suggested improvements and broader commentary.
This paper was edited by Simon Mudd and reviewed by Christoph Glotzbach and one anonymous referee.
Anderson, R. S. and Anderson, S. P.: Geomorphology: The Mechanics and Chemistry of Landscapes, Cambridge University Press, https://doi.org/10.1017/CBO9780511794827, 2010. a, b
Barnes, R.: Accelerating a fluvial incision and landscape evolution model with parallelism, Geomorphology, 330, 28–39, https://doi.org/10.1016/j.geomorph.2019.01.002, 2019. a
Barnes, R., Callaghan, K. L., and Wickert, A. D.: Computing water flow through complex landscapes – Part 3: Fill–Spill–Merge: flow routing in depression hierarchies, Earth Surf. Dynam., 9, 105–121, https://doi.org/10.5194/esurf-9-105-2021, 2021. a
Barnhart, K. R., Tucker, G. E., Doty, S. G., Shobe, C. M., Glade, R. C., Rossi, M. W., and Hill, M. C.: Inverting topography for landscape evolution model process representation: 1. Conceptualization and sensitivity analysis, J. Geophys. Res.-Earth, 125, e2018JF004961, https://doi.org/10.1029/2018JF004961, 2020. a
Bonetti, S., Hooshyar, M., Camporeale, C., and Porporato, A.: Channelization cascade in landscape evolution, P. Natl. Acad. Sci. USA, 117, 1375–1382, https://doi.org/10.1073/pnas.1911817117, 2020. a
Bonnet, S. and Crave, A.: Landscape response to climate change: insights from experimental modeling and implications for tectonic versus climatic uplift of topography, Geology, 31, 123–126, https://doi.org/10.1130/0091-7613(2003)031<0123:LRTCCI>2.0.CO;2, 2003. a
Braun, J. and Willett, S. D.: A very efficient O(n), implicit and parallel method to solve the stream power equation governing fluvial incision and landscape evolution, Geomorphology, 180–181, 170–179, https://doi.org/10.1016/j.geomorph.2012.10.008, 2013. a
Croissant, T. and Braun, J.: Constraining the stream power law: a novel approach combining a landscape evolution model and an inversion method, Earth Surf. Dynam., 2, 155–166, https://doi.org/10.5194/esurf-2-155-2014, 2014. a, b
Fernandes, V. M., Roberts, G. G., White, N., and Whittaker, A. C.: Continental-scale landscape evolution: a history of North American topography, J. Geophys. Res.-Earth, 123, 2689–2722, https://doi.org/10.1029/2018JF004979, 2019. a, b, c
Glotzbach, C.: Deriving rock uplift histories from data-driven inversion of river profiles, Geology, 43, 467–470, https://doi.org/10.1130/G36702.1, 2015. a
Goren, L., Fox, M., and Willett, S. D.: Tectonics from fluvial topography using formal linear inversion: theory and applications to the Inyo Mountains, California, J. Geophys. Res.-Earth, 119, 1651–1681, https://doi.org/10.1002/2014JF003079, 2014. a
Hobley, D. E. J., Adams, J. M., Nudurupati, S. S., Hutton, E. W. H., Gasparini, N. M., Istanbulluoglu, E., and Tucker, G. E.: Creative computing with Landlab: an open-source toolkit for building, coupling, and exploring two-dimensional numerical models of Earth-surface dynamics, Earth Surf. Dynam., 5, 21–46, https://doi.org/10.5194/esurf-5-21-2017, 2017. a, b, c, d
Hoggard, M., Austermann, J., Randel, C., and Stephenson, S.: Observational Estimates of Dynamic Topography Through Space and Time, Chap. 15, American Geophysical Union (AGU), https://doi.org/10.1002/9781119528609.ch15, 371–411, 2021. a
Kovachki, N., Li, Z., Liu, B., Azizzadenesheli, K., Bhattacharya, K., Stuart, A., and Anandkumar, A.: Neural operator: learning maps between function spaces with applications to PDEs, J. Mach. Learn. Res., 23, 1–97, 2023. a, b, c, d
Kwang, J. S. and Parker, G.: Extreme memory of initial conditions in numerical landscape evolution models, Geophys. Res. Lett., 46, 6563–6573, https://doi.org/10.1029/2019GL083305, 2019. a
Lachaise, M. and Schweißhelm, B.: TanDEM-X 30m DEM Change Maps Product Description, Issue Public Document TD-GS-PS-0216 Issue 1.0, 2023. a
Lague, D.: The stream power river incision model: evidence, theory and beyond, Earth Surf. Proc. Land., 39, 38–61, https://doi.org/10.1002/esp.3462, 2014. a, b
Li, Z., Kovachki, N., Azizzadenesheli, K., Liu, B., Bhattacharya, K., Stuart, A., and Anandkumar, A.: Fourier Neural Operator for Parametric Partial Differential Equations, arXiv [preprint], https://doi.org/10.48550/arXiv.2010.08895, 2022. a, b, c, d, e, f, g, h, i, j, k
Li, Z., Zheng, H., Kovachki, N., Jin, D., Chen, H., Liu, B., Azizzadenesheli, K., and Anandkumar, A.: Physics-informed neural operator for learning partial differential equations, ACM/IMS Journal of Data Science, 1, Pages 1–27, https://doi.org/10.1145/3648506, 2024. a
Morris, M. J., Lipp, A. G., and Roberts, G. G.: Towards inverse modeling of landscapes using the Wasserstein distance, Geophys. Res. Lett., 50, e2023GL103880, https://doi.org/10.1029/2023GL103880, 2023. a, b
O'Malley, C. P. B., White, N. J., Stephenson, S. N., and Roberts, G. G.: Large-scale tectonic forcing of the African landscape, J. Geophys. Res.-Earth, 126, e2021JF006345, https://doi.org/10.1029/2021JF006345, 2021. a, b
Perrigo, A., Hoorn, C., and Antonelli, A.: Why mountains matter for biodiversity, J. Biogeogr., 47, 315–325, https://doi.org/10.1111/jbi.13731, 2020. a
Press, W. H., Teukolsky, S. A., Vetterling, W. T., and Flannery, B. P.: Numerical Recipies: The Art of Scientific Computing, Cambridge University Press, ISBN 978-0-521-88068-8, 2007. a
Roberts, G.: Learning How Landscapes Evolve with Neural Operators, Zenodo [code], https://doi.org/10.5281/zenodo.14616761, 2025. a
Roberts, G. G. and Wani, O.: A theory of stochastic fluvial landscape evolution, P. Roy. Soc. A-Math. Phy., 480, 20230456, https://doi.org/10.1098/rspa.2023.0456, 2024. a, b, c, d
Roberts, G. G. and White, N.: Estimating uplift rate histories from river profiles using African examples, J. Geophys. Res.-Sol. Ea., 115, B02406, https://doi.org/10.1029/2009JB006692, 2010. a, b, c, d
Scheingross, J. S., Lo, D. Y., and Lamb, M. P.: Self-formed waterfall plunge pools in homogeneous rock, Geophys. Res. Lett., 44, 200–208, https://doi.org/10.1002/2016GL071730, 2017. a
Tarboton, D. G.: A new method for the determination of flow directions and upslope areas in grid digital elevation models, Water Resour. Res., 33, 309–319, https://doi.org/10.1029/96WR03137, 1997. a
Turner, J. P., Berry, T. W., Bowman, M. J., and Chapman, N. A.: Role of the geosphere in deep nuclear waste disposal – an England and Wales perspective, Earth-Sci. Rev., 242, 104445, https://doi.org/10.1016/j.earscirev.2023.104445, 2023. a